At Dynautics, we know first-hand how challenging it is to design and build an Uncrewed Surface Vessel (USV). Based on over 30 years of experience, we have developed adaptive autopilot and VCS technologies and dynamic simulation tools to get you to on-water trials faster and more efficiently, reducing time to launch for USVs. We start with your objectives and apply our knowledge and scientific integrity to deliver strong commercial results.
Mission goals, payload requirements, power budget, hull design, communication systems and propulsion control and management are just some of the complex decisions that need to be made, analysed and implemented for any USV project. We work hard to ensure that onboard control systems and integration protocols are robust and efficient and integrate seamlessly into third party drive and motor systems, providing optimal functionality and redundancy.
Our advanced vessel control and management systems are proven on a range of different USV types. Below, we outline just some of the control solutions that we have designed and built, reducing time to launch for customers around the world.
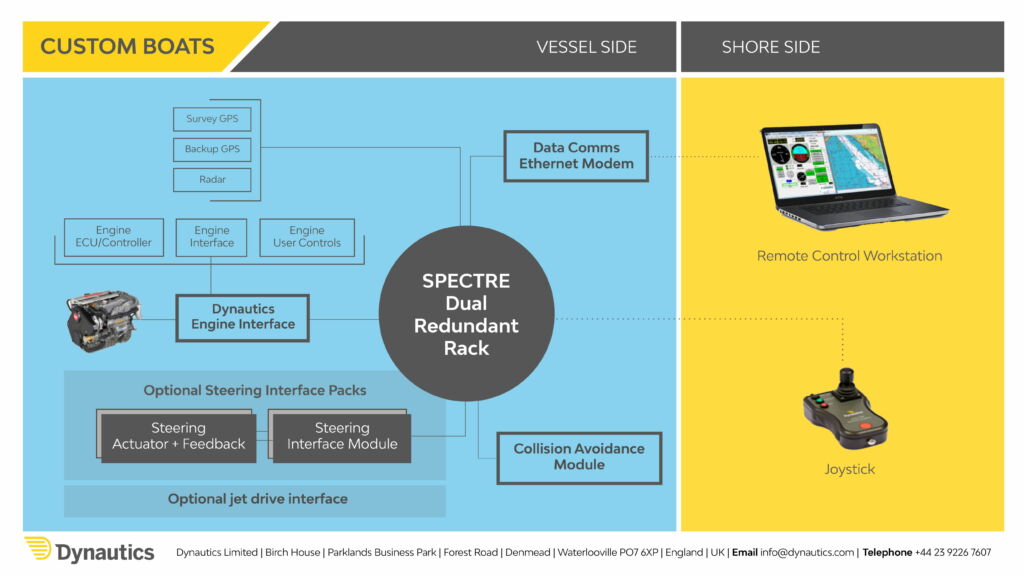
Custom Boats
We engage early on in design discussions to provide input into the optimal hull and propulsion design. Our simulation system, Ship Sim, additionally accelerates development by reducing design iterations, enabling optimisation of the hull design, propulsion type and configuration.
If vehicle design is already defined, the simulation process can be used to assess performance and pre-tune the autopilot prior to costly sea trials. Payload integration, including power management, data logging and communication can be undertaken reliably and rapidly, reducing the time to launch.
Schematic example:
Find out more about our work with SEA-KIT International.
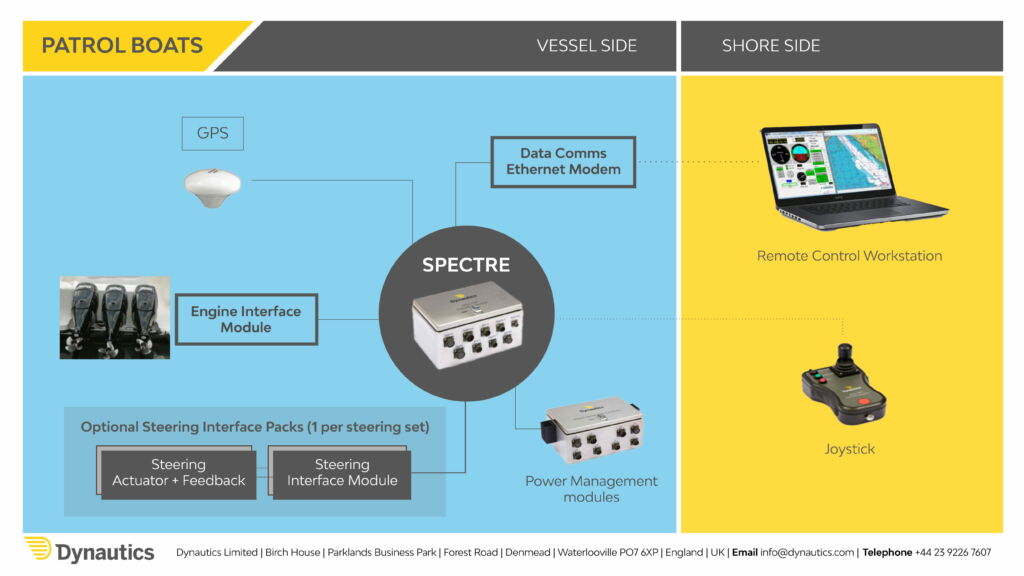
Patrol Boats
Patrol boats are often deployed in extreme environments for reconnaissance and surveillance where precision, endurance and reliability are paramount. Dynautics has worked closely with multiple naval and border force customers around the world to develop robust unmanned patrol boat control solutions.
We have experience of interfacing to numerous propulsion systems, including ‘Gas’ inboard/outboards and twin water jets for high-speed operations. Our SPECTRE autopilot and interfacing electronics can be configured to provide precise and reliable control, reducing commissioning duration and time to launch.
Schematic example:
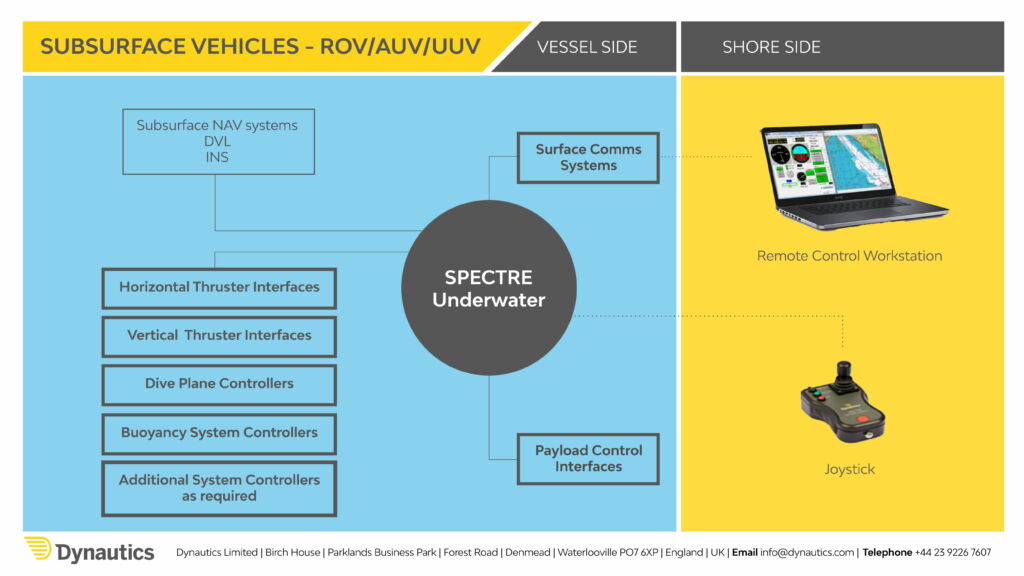
Subsurface Vehicles – ROV/AUV/UUV
Our expertise in the control and communication of sub-surface vehicles, such as AUV/UUVs and ROVs, allows us to expand the capabilities of your underwater mission. Using our AUV Sim software, we can advance the development cycle and catalyse vehicle efficiency. Accurate positioning can be achieved through ultrasound communication and/or dead reckoning.
Our experience in dynamic positioning (DP) solutions allows us to provide you with pin-point station keeping, so that you can focus on your mission.
Find out more about our work with Subsea Craft.
Take a look at Phantom, our modular UUV/AUV.
Schematic example:
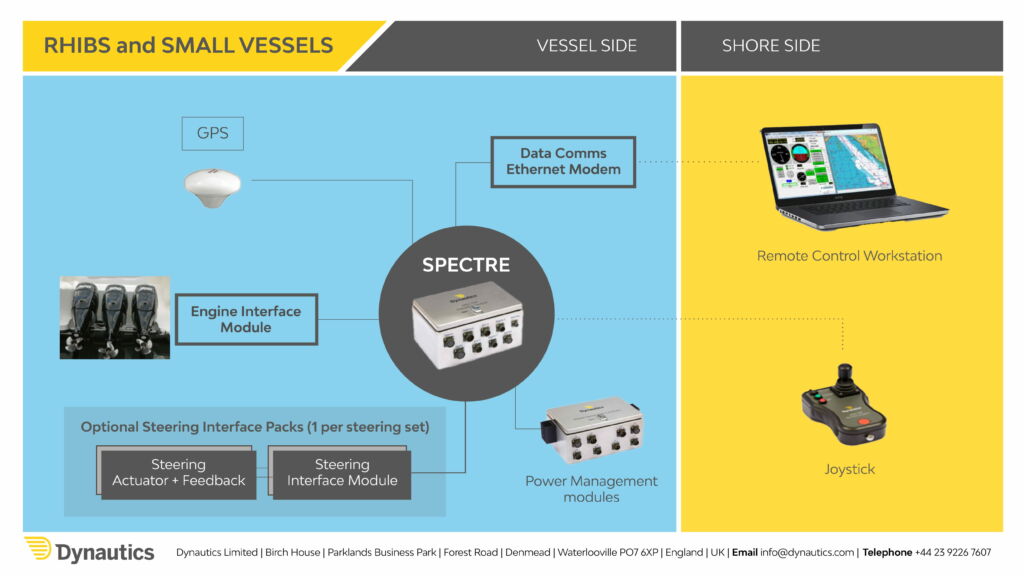
RHIBS & Small Crafts
High speed, manoeuvrable RHIBS or small outboard engine crafts are ideal platforms for some missions. We can retrofit a vehicle control system on an existing boat, thereby expanding its capabilities to make it completely unmanned or partially assisted, allowing the crew to focus on their task.
Vehicle navigation and propulsion control utilising SPECTRE autopilot technology, increase the boat’s endurance and reduce user fatigue. In an unmanned configuration, the RHIB can be controlled via a UHF-connected wireless joystick, an intermediate frequency UHF modem at ranges up to 20 nautical miles (line of sight), and/or Iridium satellite for over-the-horizon communications and control.
Schematic example:
Find out more about our work with ALTI.
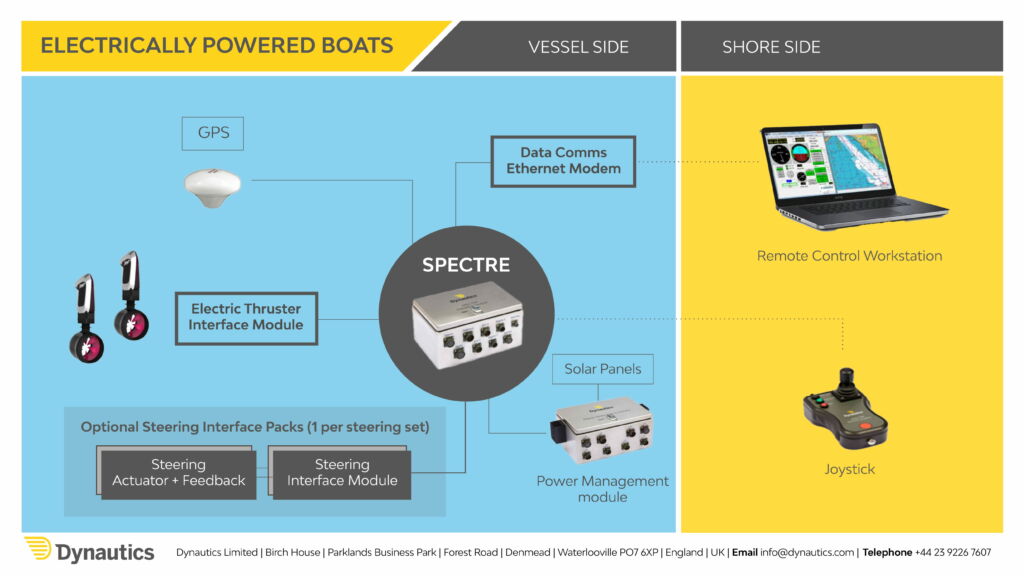
Electrically Powered Vehicles
Where a mission requires the use of a long endurance and low power vehicle, we can support with a range of low power consuming electronic control modules. This means you can manage a small power budget, generated from solar panels, and remotely monitor and switch off redundant sensors.
The comprehensive development processes behind our technologies ensure that energy-hungry operating systems, which typically carry a power budget overhead, are not needed for these vehicles. Our embedded code is native, targeted and efficient, enabling you to efficiently monitor and control the vehicle from a desktop interface, via RUDICS Iridium communications to the onboard power management module.
Schematic example:
Find out more about our work with AutoNaut.
At Dynautics, we continue to drive the development of adaptive autopilot and VCS technologies and the efficient use of dynamic simulation to reduce time to launch. Additionally, our vehicle management systems ensure efficient and reliable operation and high-quality data collection.
Contact us to find out how we could help you achieve your uncrewed mission objectives.