An article by Dr Henry Robinson, CEO of Dynautics.
For some years now, Dynautics has supported the development of future marine technologist talent by sponsoring and working hands-on with the Society of Maritime Industries’ (SMI) MAChallenge competition. The 2022-23 challenge was particularly rewarding, so I wanted to share some of my experiences from the finals, which took place in June 2023 at Timsbury Lake in Hampshire, UK.
The theme for 2022-23’s competition was the autonomous and safe operation of an uncrewed surface vessel (USV) to map and identify pollutants in the marine environment. This edition of the challenge saw new standards of performance set by the finalists from Aberystwyth University, Solent University and the University of Southampton.

In two down-select events, all teams demonstrated their abilities to create novel solutions and make them work, but Aberystwyth claimed the crown at the on-water finals – controlling a real USV on a real lake – with a particularly impressive ‘searching for surface targets’ algorithm that even identified some ducks!
This was an excellent piece of work in which the students used a Raspberry Pi with a simple camera, programmed with a neural network algorithm to identify objects of interest in the field of view. All the processing happened on board. When the object was identified, the onboard processor sent back a captured image with geolocation data to build up a map of objects they had found. At the same time, the craft ran an expanding spiral search pattern from the centre of the search area.
Virtual pollution plume
Another impressive result was in the automated search for pollution. We set up a virtual plume based on a heat map superimposed on the lake. As the USV traversed the area, the virtual sensor provided a signal which represented the concentration of pollutant. The students had to run a search pattern and identify the epicentre of the pollutant.
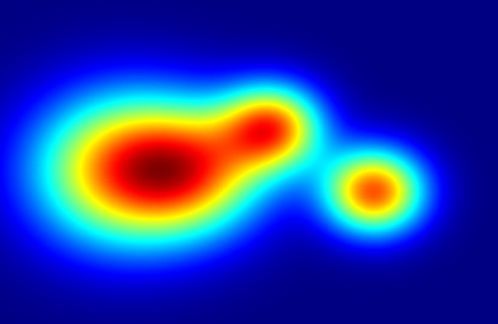 We were interested to see how the Aberystwyth team opted not to run a coarse grid search first. Instead, they went in a spiral, found a signal, carried out some local mapping to identify the local gradient and then repeated this process, rapidly homing in on the epicentre.
We were interested to see how the Aberystwyth team opted not to run a coarse grid search first. Instead, they went in a spiral, found a signal, carried out some local mapping to identify the local gradient and then repeated this process, rapidly homing in on the epicentre.
It was a risky gamble but it paid off handsomely.
We were also interested to see the different approaches to the basic problem of controlling the vessel path. Presented with a USV already equipped with an autopilot, one team made use of the built-in track-following autopilot. It was a quick solution, but meant that it was more difficult to make changes to the path without stopping and creating a new set of waypoints. Another team did not even use the heading autopilot, preferring instead to command differential thrust directly, giving them complete control and the ability to make their algorithms react to data and events on the water in real time.
Every year, the range of students that the competition attracts proves that maritime autonomy is an exciting career choice. It is truly satisfying to see MAChallenge nurturing and ultimately delivering our future maritime autonomy professionals.
—
How we support MAChallenge
MAChallenge aims to highlight the opportunities in the MAS industry and provide a focus for the future innovators that will drive the industry to the next level. The competition’s core objectives are to stretch students’ knowledge and promote creative thinking, to encourage team work and to connect the brightest talent from the UK’s universities to the country’s MAS industry, ensuring that the autonomous revolution continues both on and under the water!
As a leading provider of control systems for uncrewed surface and subsea vehicles, Dynautics has worked closely with the SMI over the years to develop robust MAChallenge roadmaps, harnessing marine simulator innovations to ensure the future resilience of the maritime sector that the competition aims to foster. In addition to the hands-on involvement of our expert team, Dynautics provides a suite of three main technology tools to contestants:
- Contestants use Dynautics’ Ship Simulator (Ship Sim) to create a simulation model of their USVs by defining key elements such as propulsion, steering and hull characteristics and placing the model in a virtual environment which can be dynamically manipulated by adjusting the sea state and overlaying cartography to explore and record behaviour.
- MAChallenge teams are also supplied with the Dynautics E-Boat control system. This hardware is supplied with pre-installed configurable firmware, exactly mirroring the real hardware that is fitted to the USV platforms. This is the core element in the architecture, giving contestants the ability to develop their control algorithms in the virtual world before transferring them to the real vehicle.
- The final building block is our Remote Control Workstation(RCW) to remotely control both the virtual and the real USV. The use of common tools ensures a seamless transfer from the development lab to the on-water competition.
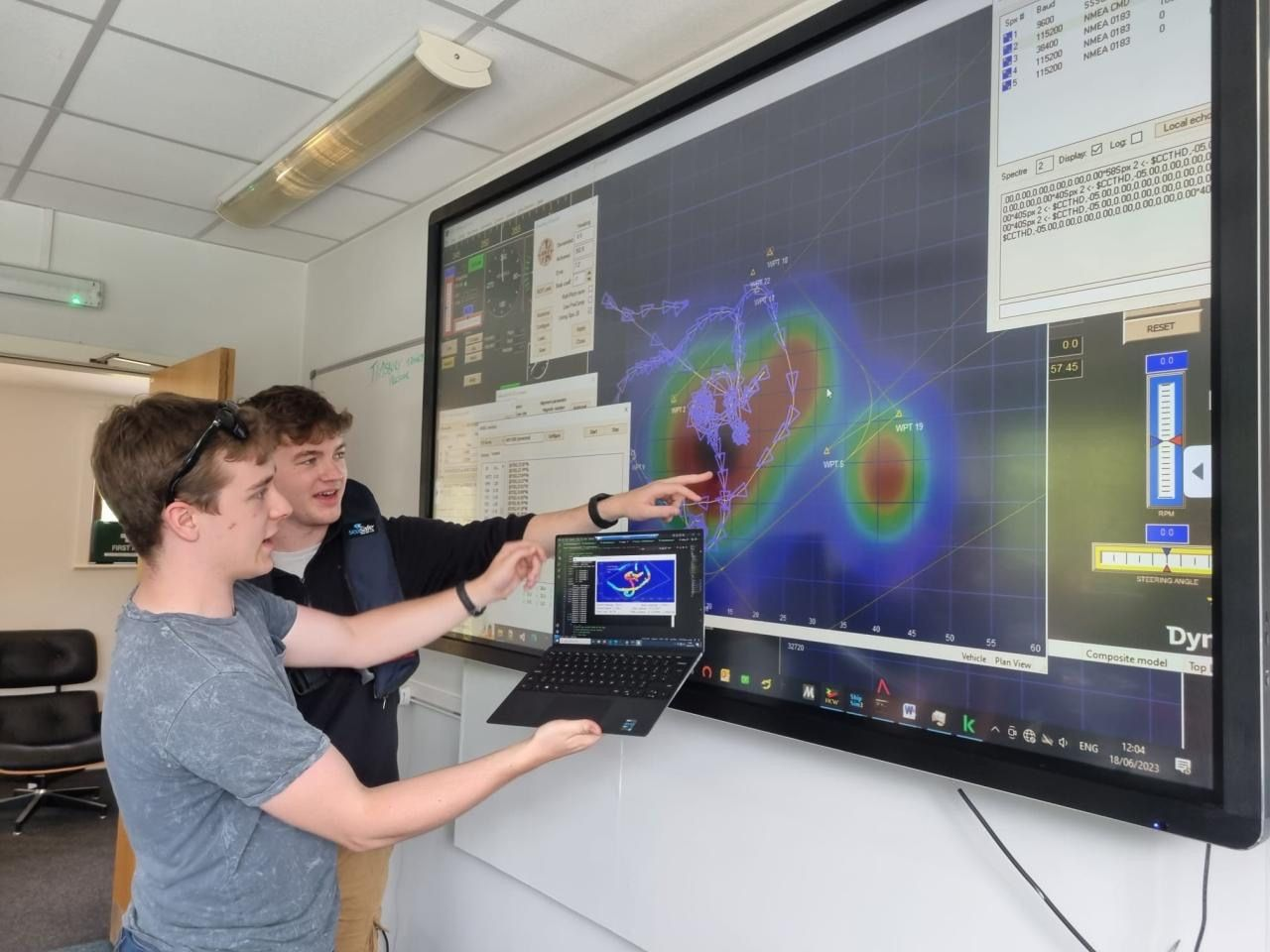
Aberystwyth University students at work on the MAChallenge 2022/23